Water Vapor Radiometer (18.5 - 25.5 GHz) - Technical Report
Ute Teuber (Hochfrequenz-Labor)
Stand April 2002
Navigation
1. Technische Daten
| Year of manufacturing | 2002 |
|---|
| Construction | HF-Labor: R. Keller, U. Teuber , P. Winkelmann
MPIfR Workshop: G. Abranches, Hupperich, S. Philipps, K.Russ
Projekt Scientist: Alan Roy |
|---|
| Number of Horns | 1 |
|---|
| Typ | 300 K Amplifier Miteq : 18 - 26 GHz NF: 1.9dBmax |
|---|
| Tsys | 190 K |
|---|
| ΔTsys | 40 mK |
|---|
| Channels | 31 |
|---|
| YIG frequency | 18-26 GHz |
|---|
| Mixer | DSB 4 ñ 26 GHz LO:9.5dB max |
|---|
| IF-Bandwidth | +/- 450 MHz |
|---|
| RF-Bandwidth | 18,5 - 26 GHz |
|---|
| max. V/F Frequency | 5 Mhz |
|---|
| Output Pulses | symmetrisch |
|---|
| Temperaturstabilität | +/- 1.5 Grad Celsius |
|---|
| Feed | Rillen-Horn |
|---|
| Calibration | Noise Diode 60K |
|---|
| Transition to Dewar | Choke-flange, Waveguide |
|---|
| Output | Ethernet / Glasfaser-Konverter |
|---|
| Rotor-Mechanik | Azimut und Elevation |
|---|
| WVR-Control SystemElektronik | Ethernet Data Acquisition System 10BaseT(Intelligent Instrumentation)
Protokoll: TCP/IP
Steuersoftware: Visual Design; Lab View, C |
|---|

2. WVR Systemübersicht
Das System wird über Computer und Internet gesteuert. Alle Versorgungsspannungen und Temperaturwerte sind per Rechner abrufbar.
Das System gliedert sich in zwei Haupkomponenten:
Das WVR-Control System (Steuereinschub 2, Power-Supply 1) und das Das WVR-Frontend (WVR 3). Das Ausgangssignal wird im TCP/IP Protokoll angeboten. Der Ethernet Converter wandelt die elektrischen Signale in optische Signale um. Die Verbindung zwischen System und lokalem Netzwerk kann somit über LWL (Lichtwellenleiter) erfolgen.Das hat den Vorteil, kilometerweite Entfernungen ohne Zwischenverstärkung überwinden zu können. LWL sind unempfindlich gegen elektrische und magnetische Einflüsse und produzieren auch selbst keine Störstrahlung. Sie sind beständig gegenüber Hitze und Witterungseinflüssen und haben bis 30 Km Länge eine Dämpfung von 0,2 dB. Blitzschutz ist nicht nötig.
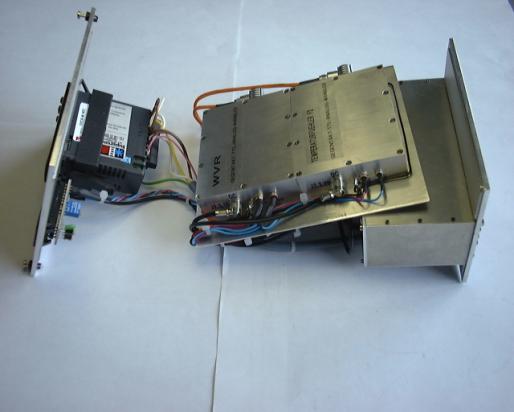
Das WVR-Frontend (WVR 3) beinhaltet alle Emfängerkomponenten, die Temperaturerfassung und die Temperaturstabilisierung.
WVR-Frontend und Control-System sind direkt durch Kabel (10m) verbunden. Die Empfänger-Box sitzt auf einem Rotor und kann somit in Elevation und Azimut geschwenkt werden.
Box und Parabolspiegel sind mechanisch verbunden.
Es wurde Wert gelegt auf ein wasserdichtes, temperaturstabilisiertes und EMV-gerechtes Gehäusedesign.
2.1 Testsoftware mit Visual Design
Rotoransteuerung und YIG-Ansteuerung Bild: webcam3
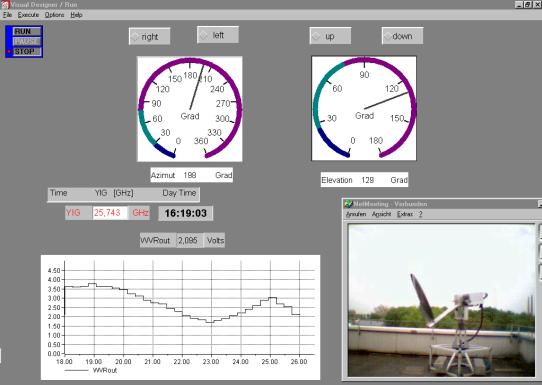
WVR Control
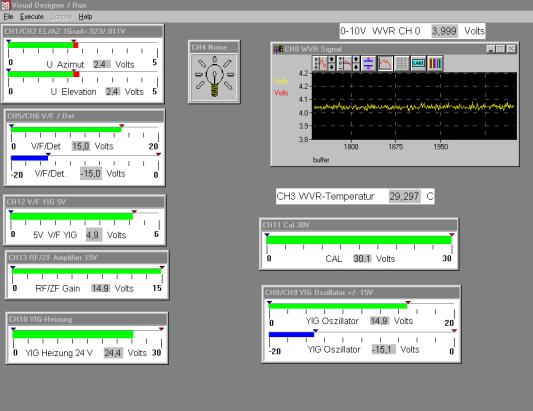
2.2 WVR Analog - Digital I/O
| PIN | FUNCTION | CONNECTION |
|---|
| 1 | Analog In Chan 0 | Total Power |
| 5 | Analog In Chan 1 | U/Grad Elevation |
| 7 | Analog In Chan 2 | U/Grad Azimuth |
| 11 | Analog In Chan 3 | WVR - Temperatur |
| 13 | Analog In Chan 4 | Noise - Diode Takt IN |
| 17 | Analog In Chan 5 | Controll-Voltage V/F / Detector (+7.5V) 15V über Spannungsteiler da Umax:10V |
| 19 | Analog In Chan 6 | Controll-Voltage V/F / Detector (-7.5V) -15V über Spannungsteiler da Umax:10V |
| 23 | Analog In Chan 7 | Controll-Voltage T/ Fiber Converter (+7.5V) 15V über Spannungsteiler da Umax:10V |
| 2 | Analog In Chan 8 | Controll-Voltage YIG - Oszillator (+7.5V) 15V über Spannungsteiler da Umax:10V |
| 4 | Analog In Chan 9 | Controll-Voltage YIG - Oszillator (-7.5V) -15V über Spannungsteiler da Umax:10V |
| 8 | Analog In Chan 10 | Controll-Voltage YIG - Heating (+6V) |
| 10 | Analog In Chan 11 | Controll-Voltage CAL (+7.5) 20V über Spannungsteiler da Umax:10V |
| 14 | Analog In Chan 12 | Controll-Voltage V/F / YIG (+5V) |
| 16 | Analog In Chan 13 | Controll-Voltage RF/ZF - Gain (+7.5V) 15V über Spannungsteiler da Umax:10V |
| | | |
| 27 | Digital Port 0: Bit 0 | YIG Oszillator - Control: Bit 4 |
| 28 | Digital Port 0: Bit 1 | YIG Oszillator - Control: Bit 5 |
| 29 | Digital Port 0: Bit 2 | YIG Oszillator - Control: Bit 6 |
| 30 | Digital Port 0: Bit 3 | YIG Oszillator - Control: Bit 7 |
| 31 | Digital Port 0: Bit 4 | YIG Oszillator - Control: Bit 8 |
| 32 | Digital Port 0: Bit 5 | YIG Oszillator - Control: Bit 9 |
| 33 | Digital Port 0: Bit 6 | YIG Oszillator - Control: Bit 10 |
| 34 | Digital Port 0: Bit 7 | YIG Oszillator - Control: Bit 11 |
| | | |
| 35 | Digital Port 1: Bit 0 | Rotor - Control: Azimuth RIGHT |
| 36 | Digital Port 1: Bit 1 | Rotor - Control: Azimuth LEFT |
| 37 | Digital Port 1: Bit 2 | Rotor - Control: Elevation DOWN |
| 38 | Digital Port 1: Bit 3 | Rotor - Control: Elevation UP |
| 39 | Digital Port 1: Bit 4 | |
| 40 | Digital Port 1: Bit 5 | Noise - Diode Takt OUT (Active Bit=1) |
Note: Active Bit = Low
| Ethernet Data Acquisition Sytem: (Effelsberg) |
|---|
| IP-Adresse | : 134.104.69.145 |
| Subnet Mask | : 255.255.240.0 |
| Gateway | : 134.104.64.16 |
3. WVR-Messergebnisse
3.1 Gainkurve des System (durch Eingangsverstärker geprägt)
3.2 Systemempfindlichkeit
3.3 Die YIG-Power
Die YIG-Power nimmt mit steigender Frequenz ab. Die Eingangsleistung des Mixers ist mit 9.5 dB angeben.
3.4 Systembandpass mit YIG: 20GHz
Das System ist als Doppelseitenbandempfänger ausgelegt (YIG:20 GHz)
3.5 Systemempfindlichkeit
Bei einer Integrationszeit von 0,1s ergibt sich bei einer Messzeit über 1 Stunde folgende Standardabweichung: RMS: 0,0017 bei Mittel: 8,393 mit Rfin: 300K.
Daraus lässt sich folgende Empfindlichkeit bestimmen:

3.6 Temperaturreglung
Die Frontendbox wird mit einem Peltierelement (121 Watt) temperatustabilisiert. Die Temperaturänderung liegt im Bereich von 2 Grad Celsius. Anfänglich wurde der Fühler des Peltierelementes auf der Baugruppenplatte plaziert. Es ergab sich ein Regelhub von 0.3 Grad Celsius. Durch Versetzen des Regelpunkts konnte dieser Effekt eleminiert werden.
Folgende Messung ist ohne den temperaturstabilisierten YIG-Oszillator durchgeführt worden.
4. WVR-Frontend
Durch einen Kompromiss bei der Wahl des Rundhohlleitersdurchmessers (R. Keller) arbeitet WVR beginnend mit 18.5 GHz und einer Bandbreite von 7.5 GHz.
Der Eingangsverstärker der Fa.Miteq bietet eine Gainkurve vom Bandanfang V: 40 dB überV:37 dB in Bandmitte und V: 39 dB am Bandende.
Tsys variiert von 160K bis 190K.
Die YIG-Frequenz ist mit 12 Bit steuerbar von 18 - 26 GHz. Das digitale Ausgangsport des Ethernet Data Systems bietet jedoch nur 8 Bit. Somit setzt die Steuerung bei Bit 4 des Oszillator ein. Zur Kalibration kann eine schaltbare Noise Source genutzt werden. Ein Hochpaß 100 MHz und ein Bandpaß von 550 MHz bestimmen das ZF-Band (nach Alan Rogers)
Frontend schematisch:

4.1 WVR-Signalverarbeitung
Detektor und V/F Konverter haben eine Liniaritätsabweichung von unter 0.1%. Als Gleichrichterdiode dient die DC 3032 der Fa. Marconi. Die Ausgangspulse sind symmetrisch mit Fmax : 5MHz. Die Temperaturerfassung liefert 10mV/ Grad Celsius und wird ebenfalls in symmetrischen Gegentaktpulsen übertragen
4.1.1 V/F Konverter
4.1.2 Temperaturfühler
Die Temperaturerfassung liefert 10mV/ Grad Celsius und wird ebenfalls in symmetrischen Gegentaktpulsen übertragen
4.1.3 Detektor
Es wurde auf ein bewährtes Konzept zurückgegriffen. (siehe ZF-Prozessor 9mm Modul 1)
5. Control System 2 (Steuereinschub 2 + Power Supply 1)
Der Steuereinschub 2 besitzt ein EMV geschütztes Gehäuse und beinhaltet DataSystem IN/OUT (2.1), die WVR-Steuerung 2.3 und die Rotor-Steuerung.
Diese Einschübe sind alle mit EMV-Dichtungen versehen.

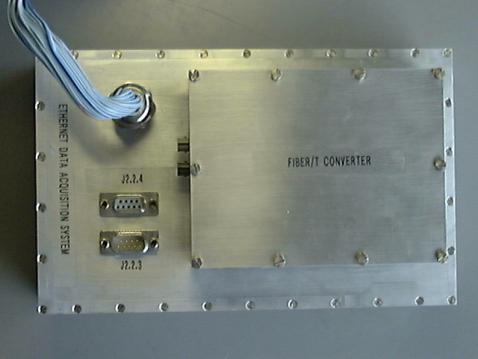
5.1 Data System IN/Out (2.2)
Dieser Einschub beinhaltet das Ethernet Data Acquisition System und den Ethernet/Fiber Converter. Beide sind in getrennten Gehäuse eingebaut und mit EMV-Dichtungen versehen.


Alle Systemkomponenten sind in einzelnen abgeschirmten Gehäuse untergebracht.


5.2 WVR-Steuerung (2.3)
In diesem Einschub befindet sich die Peltiersteuerung und die Signalaufbreitung, sowie die Rauchdiodenansteuerung. Das WVR-Messignal wird analog angezeigt und die Signalverteilung für das Ethenetsystem sitzt ebenfalls in diesem Einschub. Der Einschub ist mit einer EMV-Dichtung versehen und alle Komponenten sind in einzelnden Gehäuse aufgebaut.


Von links nach rechts:
Peltiersteuerung, F/V-Konverter für WVR-Out und Temperaturerfassung, Signalverteilung
Signalverteilung

5.2.1 Verteilerplatine
5.2.2 Rauschdiodentreiber
5.2.3 WVR-Signalanzeige
5.2.4 Gegentakt/Analog Wandler Temperaturwerte
5.2.5 Gegentakt/Analog Wandler Messsignal
5.2.6 Peltiersteuerung
| | 24 V | GND | Out 1 | Out 2 |
| Kühlen | Out 1 | Out 2 | Kontakte 2-3 geschlossen | Kontakte 13-15 geschlossen |
| Heizen | Out 2 | Out 1 | Kontakte 1-2 geschlossen | Kontakte 14-15 geschlossen |
6. Verdrahtungspläne
6.1 Rotor/Control-System
(ins Bild klicken für größere Darstellung)
6.2 WVR-Frontend/Control-System
(ins Bild klicken für größere Darstellung)
6.3 Power Supply/Control-System
(ins Bild klicken für größere Darstellung)
7. Power-Supply
(ins Bild klicken für große Version)
8. EMV-Messungen
8.1 WVR Störstrahlung bei 11cm
(WVR Box)
(WVR-Steuerung)
8.2 WVR Störstrahlung bei 13cm
(WVR-Box)
(WVR-Steuerung)
8.3 WVR Störstrahlung bei 21cm
(WVR-Box)
(WVR-Box System Power off!)
(WVR-Steuerung)

(WVR-Steuerung System Power off!)
8.4 WVR RF- Störstrahlung YIG 19.068 GHz
(WVR-Horn mit linear Logarithmischer Breitbandantenne gemessen)
(Am WVR-Horn mit Standard Gain-Horn gemessen Average:1000)
(Am WVR-Horn mit Standard Gain-Horn gemessen +Amplifier DBL 1826N310)
(An WVR Boxunterseite Peltierelement mit Standard Gain-Horn + Amplifier DBL 1826N310)
8.5 WVR niederfrequente Störstrahlung
(Steuerung Rueckseite Kabelausgang)
(Steuerung Vorderseite)
(Steuerung Lüftungsschlitz Oberseite)
(Steuerung Kabelbaum)
(Messung an Steckerboxschlitz)
(Messung Rueckseite)
9. Links